
Real-world Lab “Robotic Artificial Intelligence”
- Project team:
Weinberger, Nora (Project leader since 2024); Linda Nierling (Project leader 2021-2024); Jérémy Lefint, Maria João Maia, Utku Norman, Leonie Seng, Felix Gnisa, Arjita Mital, Pascal Vetter (until 2025)
- Funding:
Ministry of Science, Research and the Arts of Baden-Württemberg
- Start date:
2021
- End date:
2025
- Project partners:
Prof. Tamim Asfour (Koordinator), Institut für Anthropomatik und Robotik (IAR), Hochperformante Humanoide Technologien (IAR-H2T) und Interactive Systems Lab (IAR-ISL); Institut für Volkswirtschaftslehre, Lehrstuhl für Wirtschaftspolitik (ECON); KIT-Zentrum Information, Systeme, Technologien (KCIST); Dienstleistungseinheit Strategische Entwicklung und Kommunikation (SEK) am KIT; KinderUniversum; Goethe-Gymnasium-Karlsruhe; CyberForum e.V. technika; Städtisches Klinikum Karlsruhe; Zentrum für Kunst und Medien (ZKM); Stadtbibliothek Karlsruhe
- Research group:
Digital Technologies and Societal Change; Life, Innovation, Health, and Technology
Project description
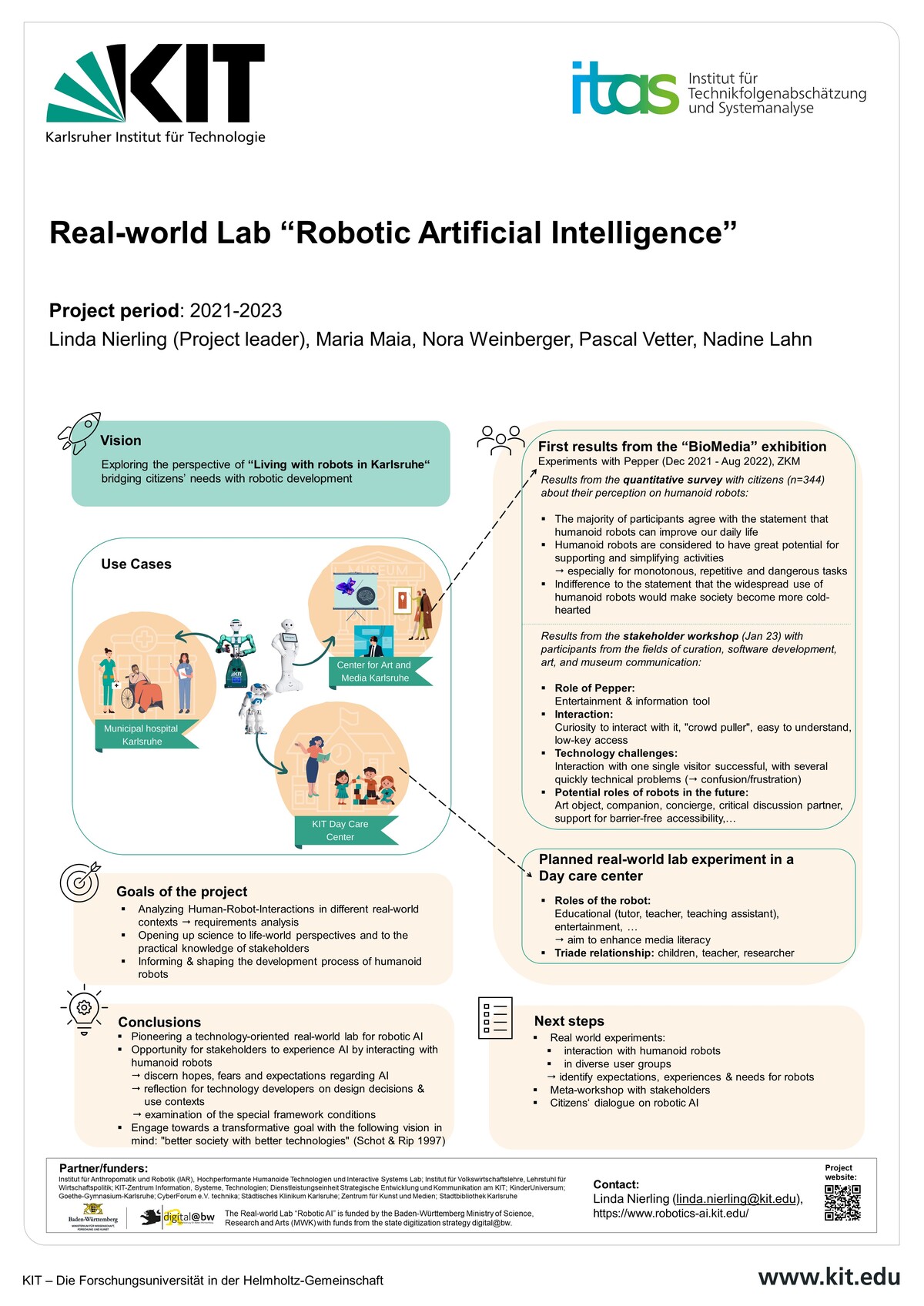

Many areas of (public) life could be made more efficient, more pleasant, and safer or otherwise improved by the use of intelligent robot technology. A major reason why this is not already happening on a larger scale is the lack of exchange between research on the one hand and potential users, profiteers, and also possible disadvantaged parties on the other. On the part of potential users, for example, there is often not enough technological knowledge available to adequately assess the current possibilities, opportunities, and risks of these future technologies. Under certain circumstances, this not only leads to misjudgements of the possibilities but also to increased reticence or to false user expectations and thus to a lack of acceptance. Conversely, it is not easy for technical research on robotic artificial intelligence (AI) to survey the plethora of possible needs and socially beneficial applications in order to orient itself accordingly in a goal-oriented manner.
The “Real-world Lab Robotic Artificial Intelligence” aims to address exactly this problem by giving the demand side a say and recording the social needs of robotic AI: A wide circle of potential users, beneficiaries, and disadvantaged persons of AI technologies of all ages shall get in close contact with KIT researchers, jointly develop possible application scenarios, discuss the respective possibilities, limits, and risks of robotic AI technologies, and conduct experiments under real conditions in the sense of feasibility studies in different scenarios at different institutions in Karlsruhe with diverse user groups. To this end, the project concept envisages making humanoid robots as embodied AI tangible for many people in different environments, ranging from daycare center and school to museum, library, and hospital, thereby both raising broad awareness of AI technology and experimentally gaining new insights for the research and development of future robots. Thus, on the one hand, the project is dedicated to the social challenge of digitalization by making robotic AI tangible and reducing possible reticence about these technologies. On the other hand, these experiments represent a bidirectional exchange and knowledge transfer at eye level between research and application for the benefit of society and contribute to a society-centered research on technologies that people really want to have.
The main task of ITAS in the project is, on the one hand, the accompanying analysis of human-robot interaction, focusing, among other things, on the organizational and, in particular, ethical-social aspects of the use of robotic AI in the fields of education, culture, and health. On the other hand, ITAS will conduct in-depth and systematic needs analyses in the respective study environments. To this end, the respective context of use and action of robotic AI will be researched, in particular through the participation of relevant stakeholders and citizens. Among other things, the acceptance, expectations, and wishes, but also the fears will be analyzed, in order to ultimately be able to derive a vision of a future shared life with robotic AI (for Karlsruhe) that is widely accepted by all those involved and thus possible demand-oriented application areas and development paths for robotic AI.
Project website: https://www.robotics-ai.kit.edu
Publications
Public Perspectives on Robot Intervention: Insights from a Low-Supervision Decision Exhibit
2026. Companion of the 2026 ACM/IEEE International Conference on Human-Robot Interaction (HRI ’26 Companion), March 16–19, 2026, Edinburgh, Scotland, UK, 5, Association for Computing Machinery (ACM). doi:10.1145/3776734.3794569
Towards a Child-Appropriate LLM for Child–Robot Conversation
2026. Companion of the 2026 ACM/IEEE International Conference on Human-Robot Interaction (HRI ’26 Companion), March 16–19, 2026, Edinburgh, Scotland, UK, 201–206, Association for Computing Machinery (ACM). doi:10.1145/3776734.3794383
Designing Robot-Mediated Phonological Awareness Activities: Child-centered Approach and Kindergarten Integration
2025. 34th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Eindhoven, Netherlands, 25-29 August 2025, 51–58, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/RO-MAN63969.2025.11217733
Artificial Moral Agents: Should Machines Take Ethical Responsibility?
2025. IEEE International Conference on Advanced Robotics and its Social Impacts (ARSO), Osaka, Japan, 17-19 July 2025, 218–224, Institute of Electrical and Electronics Engineers (IEEE). doi:10.1109/ARSO64737.2025.11124921
Gemeinsam die Zukunft der Robotik denken: Welche Antworten liefert die Technikfolgenabschätzung in Reallaboren?
2025, July 1. KIT-Reallabor "Robotische Künstliche Intelligenz" (2025), Karlsruher Institut für Technologie, July 1, 2025
Gemeinsam die Zukunft der Robotik denken: Welche Antworten liefert die Technikfolgenabschätzung in Reallaboren?
2025, April 9. Soziale Roboter im öffentlichen Sektor, Hochschule für Polizei und öffentliche Verwaltung Nordrhein-Westfalen (2025), Gelsenkirchen, Germany, April 9, 2025
Drawings for Insight on Preschoolers’ Perception of Robots
2024. Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction, 920–924, Association for Computing Machinery (ACM). doi:10.1145/3610978.3640608
Trust “in the field”: reflections on a real-world lab deploying social robots in childcare settings
2024. Proceedings of the SCRITA 2024 Workshop on Trust, Acceptance and Social Cues in Human-Robot Interaction at IEEE RO-MAN 2024, 26th-30th August 2024, Pasadena, Ca., CEUR-WS.org
Woher wissen wir, was Sie wissen?
2024. TRIANGEL Transfer | Kultur | Raum & KIT Reallabore : Afterwork | Reallabor trifft Robotik (2024), Karlsruhe, Germany, July 2–6, 2024
Different Models of Knowledge -Insights from Real-World Labs on Robotic Artificial Intelligence
2024. International Conference Knowledge Transfer in and through Living Labs (2024), Aachen, Germany, June 24–26, 2024
Technology-Centric Real-World Labs: Challenges and Opportunities for a New Mode of Participatory Research From the Perspective of Computer Science
2023. 10. Workshop Mensch-Maschine-Interaktion in sicherheitskritischen Systemen, Gesellschaft für Informatik (GI). doi:10.18420/muc2023-mci-ws02-431
Künstliche Intelligenz und ihre Folgen – Ansatzpunkte für eine transformative Gestaltung am Beispiel des "Reallabors Robotische KI"
2023. Veranstaltungsreihe : Unsupervised Thinking / Unüberwachtes Denken (2023), Online, June 14, 2023
Reallabor „Robotische KI“ – KI im städtischen Kontext erfahrbar machen
2023. KI-Dialog "Reallabore als Innovationstreiber" (2023), Heilbronn, Germany, March 23, 2023
Holding the Tension between Technological Pathways and Societal Needs : A critical Reflection on a Technology Oriented Real-World Lab
2023. 21st Annual STS Conference : Critical Issues in Science, Technology and Society Studies (2023), Graz, Austria, May 8–10, 2023
Real world Lab “Robotic Artificial Intelligence” - Experience artificial intelligence through humanoid robots
2022. Cultures of Artificial Intelligence - New Perspectives for Museums (2022), Online, December 1–2, 2022
Contact
Karlsruhe Institute of Technology (KIT)
Institute for Technology Assessment and Systems Analysis (ITAS)
P.O. Box 3640
76021 Karlsruhe
Germany
Tel.: 0721 608-23972
E-mail